The object manipulator is a mechanism that allows a robot to interact with objects in its environment. There are four main types of object manipulators: plows, scoops, friction grabbers, and accumulators.
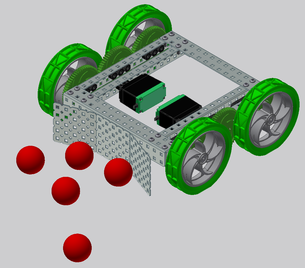
Plows
|
A plow is a passive system that moves objects without actually picking them up. They are the easiest to build but are not very common in VEX robotics competition since they have a very limited function. Take a look at the VEX curriculum on object manipulators to learn more. |
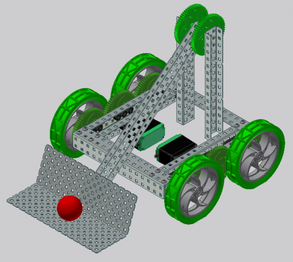
Scoops
|
A scoop applies force underneath an object such that the object can be elevated and carried. This is also a passive intake system since no motors are actually used on the object manipulator itself.
This type of object manipulator depends on gravity to hold the object on or in the scoop. |
|
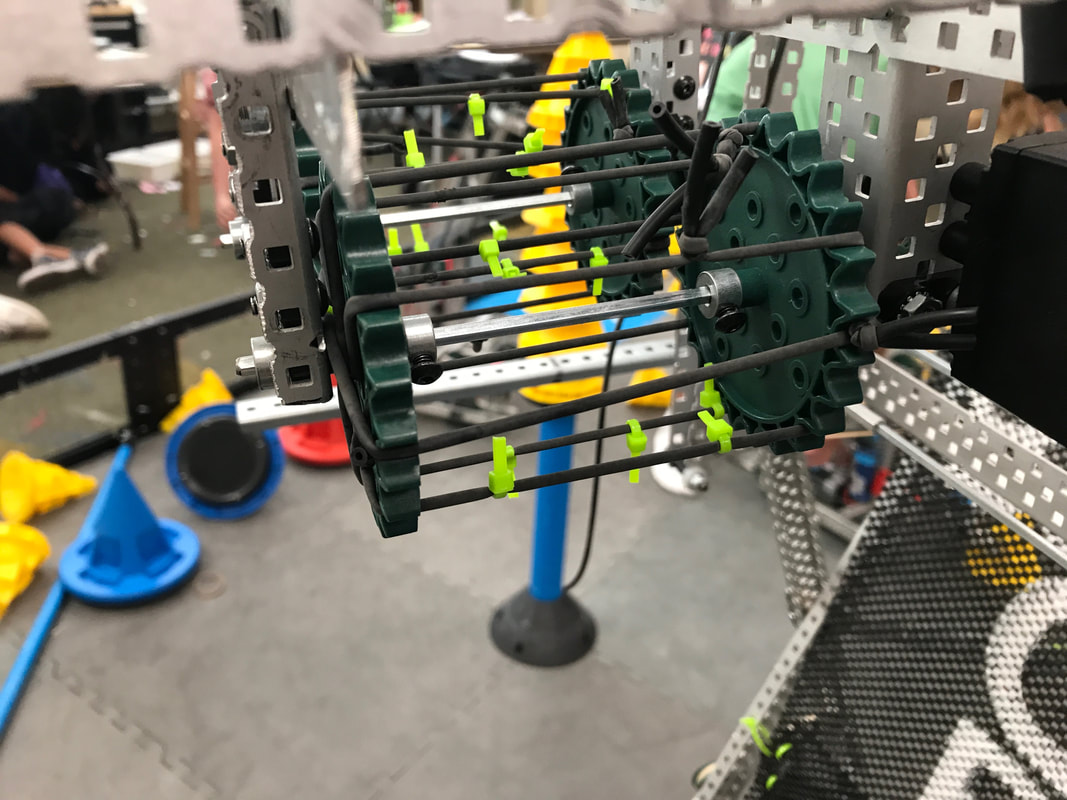
Friction Grabber
|
A friction grabber applies force to an object in at least two places, allowing the object to be pinched or grabbed. The friction grabber has the ability to hold objects securely and are generally the type that provides the most control over objects.
Although many VEX kits come with a claw, often students make their own friction grabbers to better fit the game pieces being manipulated. As seen in the VEX curriculum for object manipulators, there are a variety of friction grabbers including top-jaw grabbers and roller claws. One version of a roller claw is shown to the left. |
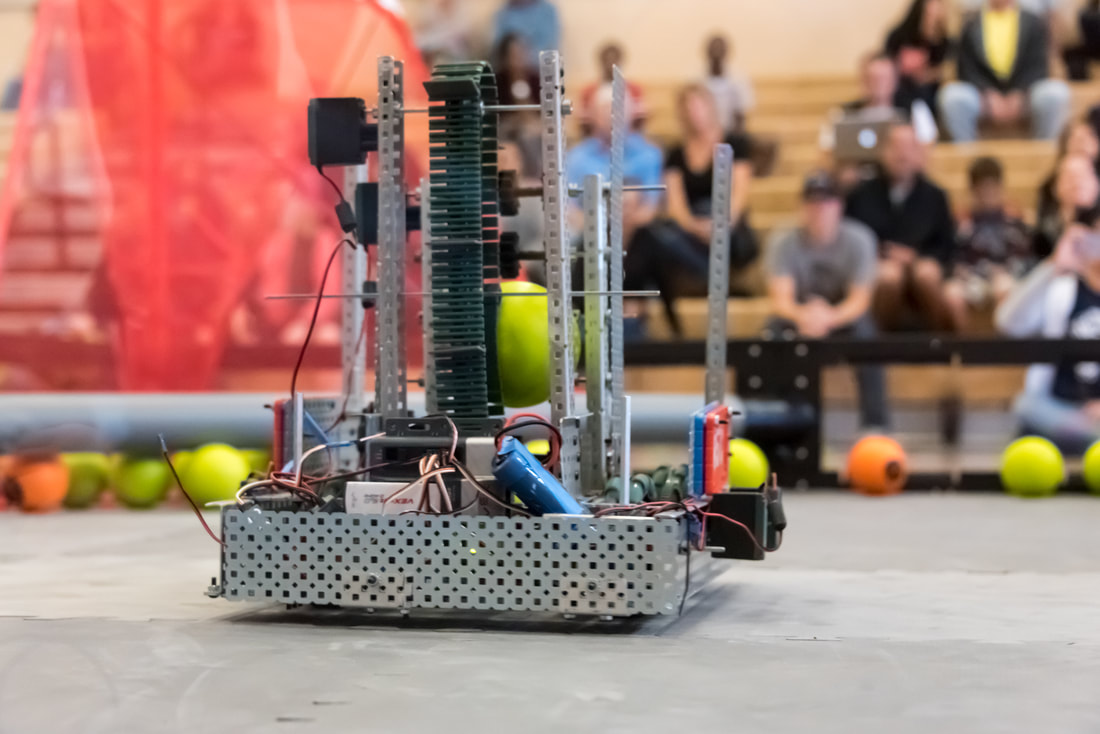
Accumulator
|
An accumulator is designed to collect and hold multiple objects at a time. This can increase efficiency of an object manipulation system. However, be sure to read the constraints in the game manual as some games do not allow for more than one game piece to be controlled at a time.
Check out the VEX curriculum on accumulators to learn more. |
|