|
Before discussing Lifting Mechanisms, it’s important to understand Degrees of Freedom. A Degree of Freedom refers to an object’s ability to move in a single independent direction of motion. To be able to move in many directions means something has many Degrees of Freedom. Moving up and down is one degree of freedom, moving right and left is another; something that can move up/down and left/right has TWO Degrees of Freedom.
A Lifting Mechanism is any mechanism designed to move in order to perform tasks and/or lift objects. In competition robotics, there are three basic types of Lifting Mechanisms: Rotating Joints, Elevators, and Linkages.
A Lifting Mechanism is any mechanism designed to move in order to perform tasks and/or lift objects. In competition robotics, there are three basic types of Lifting Mechanisms: Rotating Joints, Elevators, and Linkages.
Rotating Joints
|
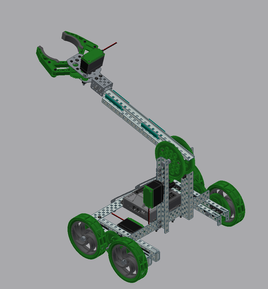
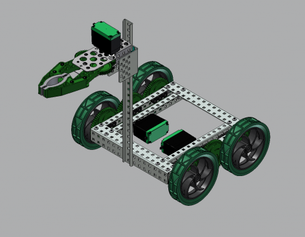
Rotating joints are the simplest lifting mechanism to design and build. This type of lifting mechanism moves on an arc, changing both the distance any manipulated objects are from a robot base, and changing the orientation of those objects (relative to their environment) on the way up. This means that if a claw is attached to the end, the angle of the claw will change as the arm is lifted.
Vex Clawbots are a good example of a robot that uses a rotating joint. The metal bar that makes the arm is secured to a gear with screws or a lock bar. Take a closer look at rotating joints using the VEX curriculum |
Elevators
|
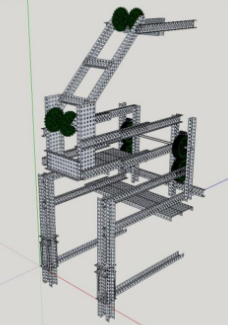
Elevators are less common than rotating joints due to the amount of friction created with the upward motion. The plastic gears may end up skipping if they are not perfectly meshed and held together. The linear motion of an elevator lift can be created using a rack and pinion or a chain drive. Both are somewhat challenging to achieve, but the claw will not change angles when mounted to this type of lift. Take a closer look at elevator lifts using the VEX curriculum.
|
|
Linkages
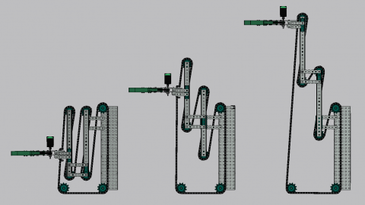
Four-bar Lift (2 on each side)
Eight-bar Lift (4 on each side)
|
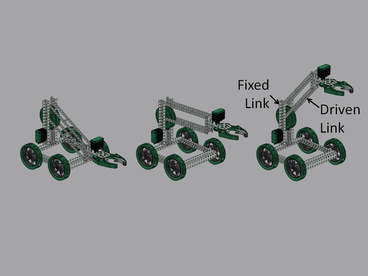
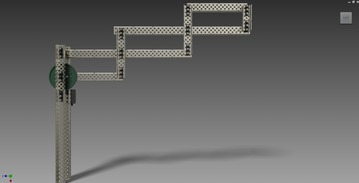
Linkages consist of a series of rigid bodies called links, connected together by freely rotating joints. Linkages convert an input motion into different types of output motion and can be very consistent. For example, the input motion could be a rotating joint, but the linkage could produce an elevator like output motion.
The simplest linkage is a four-bar lift. To increase the height, more bars can be added to make a 6-bar lift or 8-bar lift. Two more advanced linkage lifts are called a double reverse four bar (left) or scissor lift (right) as shown below. To take a closer look at linkage lifts using the VEX curriculum.
|